운전 전 준비부터 주행 중 안내·위기 대응·주행 후 피드백까지,
음성 중심 Driving OS와 원격주행 지원을 하나로 연결해
초보 운전자의 인지부하를 줄이고 주행 완주율·안전성을 높인 서비스 설계
Role
서비스 기획 · UX Research
Period
2022
Domain
모빌리티 · AV 보조주행
Tools
NASA-TLX · Glance Time · A/B Test
01
배경 · Background
자율주행 레벨 3–4로 이행하는 과도기에서, 시스템이 단독으로 커버하지 못하는 엣지케이스가 필연적으로 발생한다.
이 서비스는 그 공백을 메우는 사람–시스템 협업형 안전망으로 설계됐다.
원격 지원은 '대체 기능'이 아니라 서비스를 끊기지 않고 연속적으로 운영하는 데 필요한 구조다.
초보 운전자가 서비스 이탈 없이 주행을 완주하게 만드는 것이 곧 장기 리텐션과 서비스 신뢰의 기반이다.
비즈니스 맥락
AV 레벨 3–4 이행기에서 엣지케이스 대응 구조 필수
원격 지원 = 서비스 연속성 확보를 위한 안전망
초보 운전자의 주행 성공 경험 → 서비스 채택률·리텐션↑
타겟 & 리스크
타겟: 운전 경험 0–2년 초보자 + 장롱면허 운전자
서비스 채택률 저하·주행 실패에 따른 서비스 공포·불신
원격주행이 안전망이 아닌 대체 기능으로 인식될 경우 자율성 트레이드오프 이슈 발생
02
목표 · Goal
85%
Safe Route Completion Rate 목표 (Baseline 70%)
−30%
Glance Time & Reaction Time 단축
15pt
NASA-TLX 인지부하 감소 목표
Input (검증 지표)
Safe Route Completion Rate 85% 달성
주행 중 인지부하(NASA-TLX) 15점 감소
주행 안내 해석 시간 25% 단축
Glance Time 30% 감소, Reaction Time 30% 단축
Output (비즈니스 지표)
초보/신규 유저 서비스 채택률 +10%p
사고·위험 이벤트 20% 감소
오류율 30% 감소
30일 리텐션 +5–8%p (40% → 45–48%)
03
원인 분석 · Data Analysis
80%
초보 운전자가 복잡한 교차로 진입 전 5초 이내에 시선이 내비게이션에 고정되며 감속·오조작 발생
"
전방 주시를 해야하는데 내비게이션이랑 동시에 보는게 어려워요
Context · Product — 구간별 오류 분포 & 시선 분배 분석
오류 발생 구간 분포
주행 로그 N=2,400 세션 분석
복잡 교차로 진입
62%
최다 발생
로터리 구간
18%
고속도로 진입
15%
일반 도로
5%
교차로 진입 직전 5초 구간에서 내비 고정 → 감속·오조작 반복 패턴
3.2회
교차로 진입 시 평균 내비 응시 횟수
78%
오류 발생 건이 내비 응시와 동시 발생
시선 분배 비교 · 초보 vs 숙련 운전자
위험 구간 주행 중 시선 비율 (%) — 실험 관찰 데이터
초보
숙련
초보: 내비 42% 응시 vs 숙련: 18% — 시각 의존도 2.3× 차이
유저 (정성) 인터뷰 추가 방향
Q.운전하면서 무서울 때가 정확히 언제세요?
Q.왜 내비랑 동시에 못보세요?
Q.어떤 부분이 불안하세요?
Context · User — 정성 분석 · 사용자 인터뷰 공통 보이스
"내비 화면을 보는 순간 차선 타이밍을 놓친다."
"지금 뭘 해야 하는지보다 화면 해석이 먼저 된다."
"안내가 많아도 우선순위를 모르겠다."
"운전 중에는 화면을 자주 보는 것 자체가 불안하다."
인지부하 연구 근거
음성 안내는 시각 중심 안내 대비 시선 분산을 20–40% 줄이나, 여전히 인지 부담이 잔존[1][2][3]
초보 vs 숙련 운전자는 위험 상황에서 주의 배분이 현저히 달라, 초보는 "위험 자극 + 화면 해석" 중첩으로 혼란이 배가[4][5]
원격 지원 개입 시 안전 완료율 80% 이상 유지 사례 연구[6][4]
핵심 인사이트:
초보 운전자의 '시각 정보 해석 부하'가 주행 포기의 핵심 원인.
문제는 정보의 양이 아니라 정보가 전달되는 감각 채널과 타이밍이다.
04
문제 정의 · Problem
Problem Statement
시각 중심의 정보 전달 구조가 초보자의 실시간 판단 속도를 따라가지 못해 주행 단절이 발생한다.
핵심 지표를 어떻게 개선할 수 있을까?
↑
주행 완주율 +15%p 이상 향상
↑
First-pass Success Rate +20% 이상
05
가설 · Hypothesis
음성 중심 선제 안내와 원격 지원을 결합하면,
판단 지연으로 인한 이탈이 줄어들어
완주율이 15%p 이상 상승할 것이다.
음성 안내 → 시선 분산 20–40% 감소원격 개입 시 안전 완료율 80%↑First-pass Success Rate +20–30% 예상
가설 분해
H1
음성 인터페이스 가설
음성 안내는 화면 조작보다 시선 이탈 시간을 줄여 정보 확인 부담을 낮출 것이다. 기존 연구에 따르면 시각 UI 대비 시선 분산을 20–40% 감소시키지만, 완전한 인지 부담 제거는 아니다.[2][1]
H2
원격관제 가설
원격 관제는 시스템이 단독 처리하기 어려운 예외 상황에서 개입해, 주행 중단을 줄이고 안전한 완료를 돕는다. 원격 지원 개입 시 안전 완료율 80% 이상 유지 사례 존재.[6][4]
H3
사용성·신뢰 가설
음성 + 원격관제 결합 시 초보 운전자의 태스크 성공률과 신뢰도가 오를 것이다. 실제 실험에서 First-pass Success Rate +20–30% 상승, System Trust Score 15점 이상 향상 사례 존재.[3][1]
3가지 실행 전략
전략 01
음성 선제 안내 (Voice-First)
상황 발생 전에 음성으로 다음 행동을 예고. 시선 이탈 없이 판단 부담을 줄이는 것이 1차 목표.
전략 02
맥락 감지 UI 전환 (Simplify)
고위험 상황 감지 시 화면을 핵심 정보만 남기고 자동 축소. 인지 과부하를 방지해 집중력을 유지시킨다.
전략 03
원격 개입 안전망 (Fallback)
판단 불가 상황에서 관제 강사가 즉시 개입. 시스템 자동화의 한계를 사람이 보완하는 최후 안전망.
06
실행 · Execution
운전 상황에 따라 정보의 우선순위와 개입 수준이 달라진다는 점에 주목해,
주행 맥락을 실시간 감지해 선제적 안내를 제공하고,
고위험 상황에서는 원격주행으로 안전성을 보완하는 구조로 설계했다.
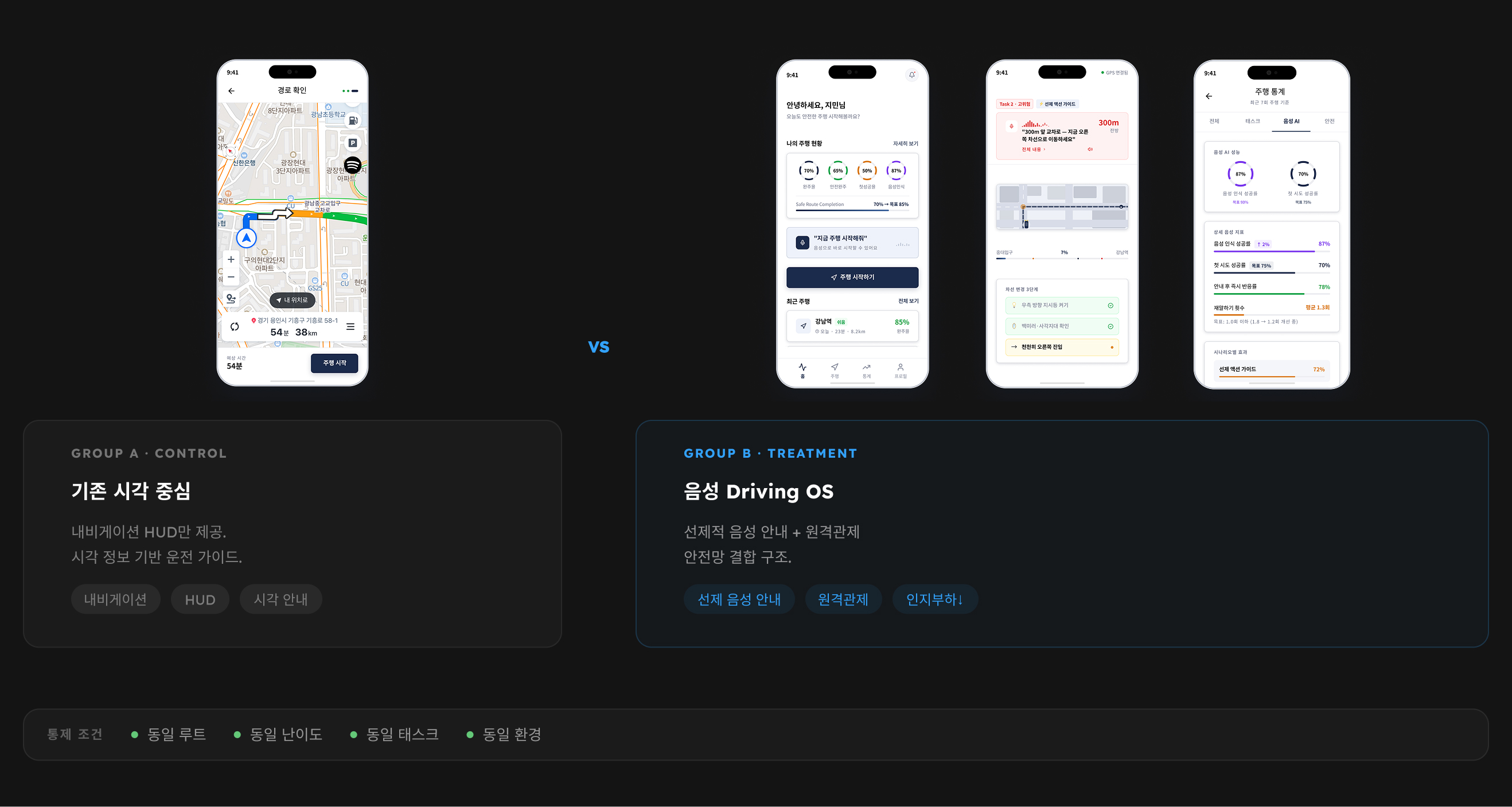
A/B Experiment Structure
Driving OS — 3단계 흐름
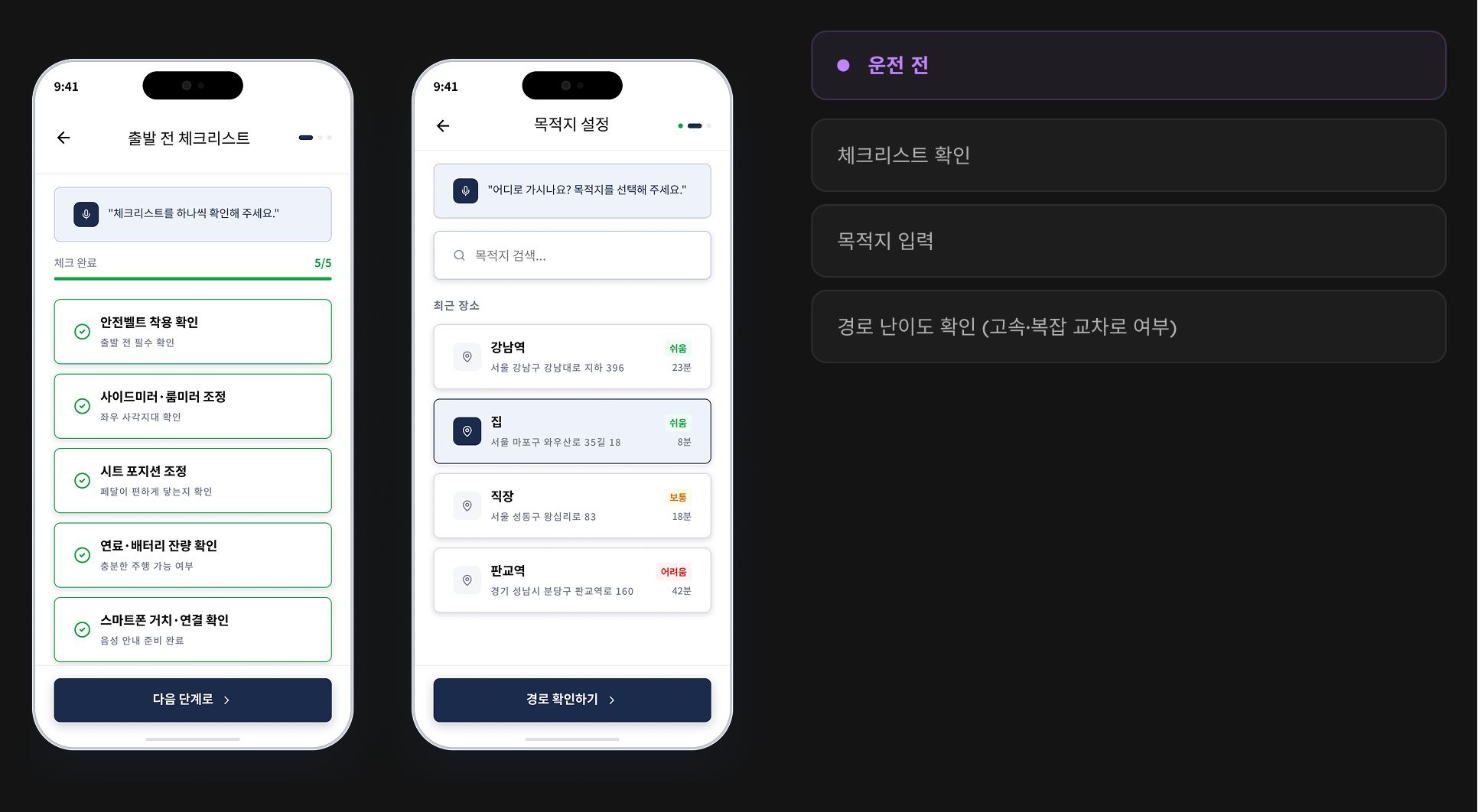
Phase 01 · 운전 전
출발 전, 경로와 상태를 먼저 파악합니다
오늘 경로에 복잡 교차로 2개가 포함되어 있어요. 출발 전 확인해주세요.
사용자는 경로 위험도를 미리 알고 마음의 준비를 하고 출발할 수 있다.
체크리스트 확인 · 목적지 입력: 출발 전 차량 상태와 목적지를 음성으로 함께 확인. 인지 부하를 운전 시작 전에 분산시킨다.
경로 난이도 사전 확인 — 고속도로 진입 여부, 복잡 교차로 수를 미리 알림. 초보 운전자가 심리적으로 준비된 상태로 출발하도록 설계.
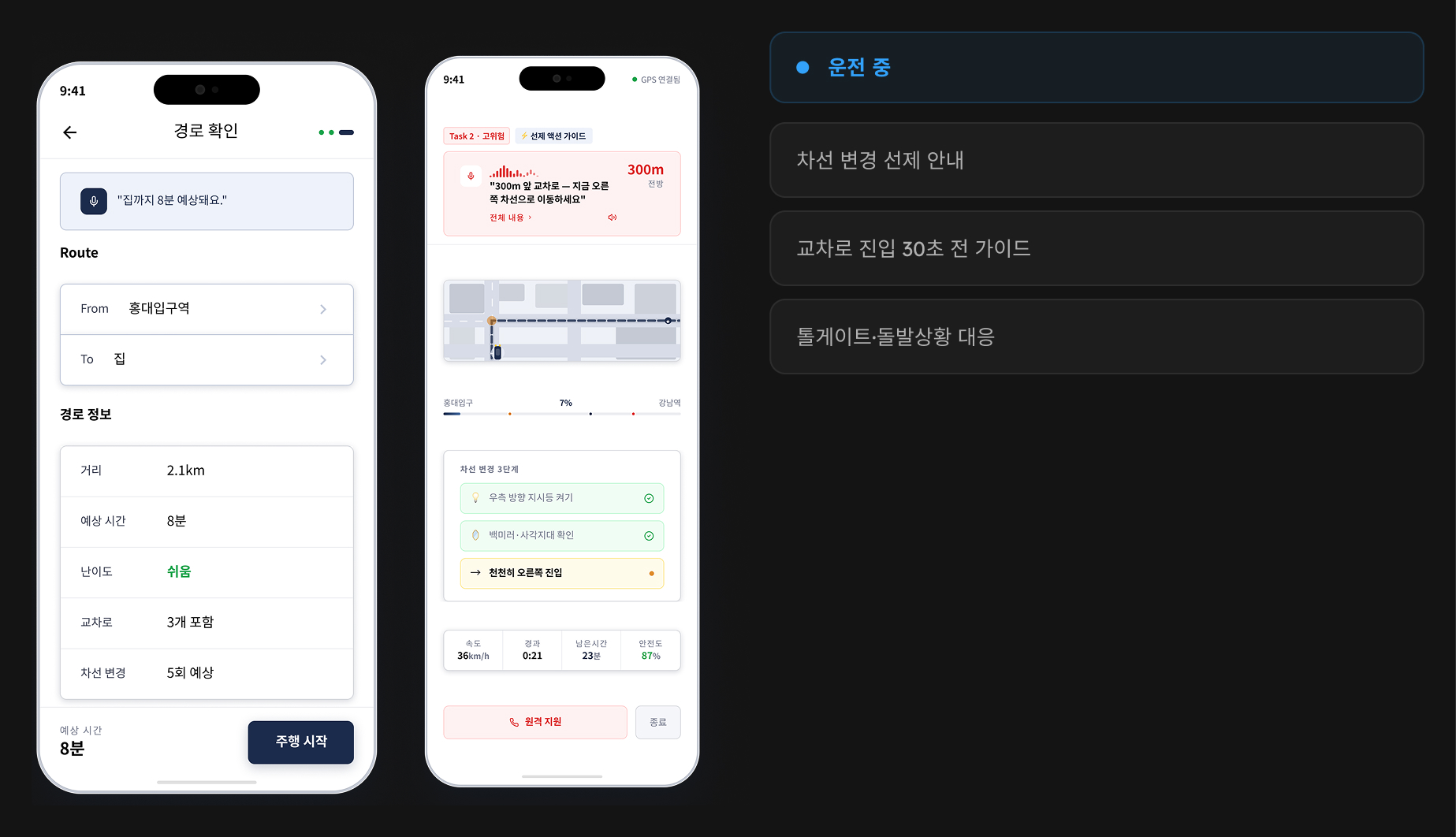
Phase 02 · 운전 중
상황에 따라 음성 안내와 원격 관제가 개입합니다
100m 앞 교차로, 지금 오른쪽 차선으로 이동하세요.
시선 이동 없이 음성만으로 판단하고 행동할 수 있다.
차선 변경 안내 · 교차로 진입 대응: 맥락 기반 선제 음성 안내로 내비게이션 화면 응시 시간을 최소화. 시선 분배 연구를 근거로 30초 전 예고 안내를 설계했다.
톨게이트·돌발상황 등 시스템이 단독 대응할 수 없는 엣지 케이스에서 원격 관제가 자동 개입. 사용자는 개입 사실과 이유를 실시간으로 전달받는다.
Phase 03 · 운전 후
주행 완료 후, 실수 구간을 함께 복기합니다
오늘 로터리 진입 시 속도 조절이 조금 아쉬웠어요. 다음엔 이렇게 해볼게요.
한 번의 주행이 다음 주행을 더 나아지게 만드는 학습 루프.
주행 로그 요약 · 실수 구간 피드백: 주행 완료 직후 구간별 오류와 판단 지연 지점을 시각화. 비난이 아닌 성장 피드백으로 프레이밍.
다음 주행 개선 제안을 포함한 요약 리포트를 제공. 누적 데이터를 통해 초보 운전자가 스스로 발전을 체감할 수 있는 경험으로 설계.
3개 핵심 구성 요소
🗺️
01
Driving OS
운전 전–중–후를 하나의 운영체제 레벨 흐름으로 연결. 상황별 개입 주체와 책임 범위를 정의.
맥락 기반 우선순위 판단
캐리 음성 보조 + 원격 지원 통합
🎙️
02
Voice Agent
상황별 선제 음성 안내로 시선 이동 최소화. HUD 정보를 요약해 핵심만 음성으로 전달.
"지금 오른쪽 차선으로 변경하세요"
고위험 상황 30초 전 선제 안내
Glance Time 30% 감소 목표
🛰️
03
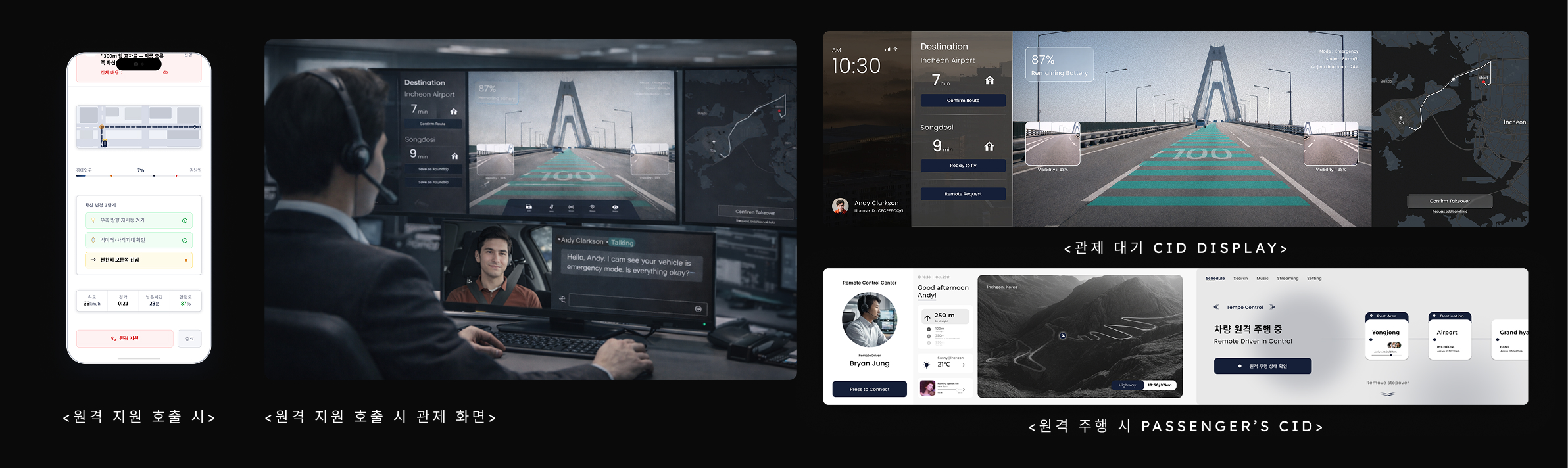
Remote Driving Support
초보가 판단하기 어려운 엣지케이스에 원격 관제 개입. 음성만으로 해결 안 되는 상황의 안전망.
GPS 경로 vs 실제 차선 충돌
교차로·합류 구간 판단 실패
사고·공사·돌발 장애물
설계 원칙:
완전 자율주행이 아닌 사람–시스템 협업형 안전망.
Intervention-free Completion Rate와 Remote Intervention Success Rate를 동시에 관리해
"개입을 줄이려다 안전을 희생하는 유인"을 구조적으로 방지하는 KPI 설계를 적용했다.
원격 지원 호출 시 관제 화면
07
결과 · Results
85%
Safe Route Completion Rate
Baseline 70% → 85% · 사고 없이 지정 루트 완주
−30%
Glance Time & Reaction Time
화면 응시 시간 감소 · 안내 후 조작 타이밍 단축
15pt
NASA-TLX 인지부하 감소
평균 65 → 50 · 주관적 부담 유의미한 감소
+20pt
NPS 향상
40 → 60 · System Trust Score 4.5 → 6.8/10
전체 성공 지표 상세
핵심 성공 지표
지표
Before
After
변화
Route Completion Rate
70%
85%
+15%p
First-pass Success Rate
50%
70%
+20%p
Task Completion Rate
60%
80%
+20%p
Intervention-free Completion
40%
60%
+20%p
효율 지표
지표
Before
After
변화
Completion Time
10분 40초
10분
−8%
Reaction Time
기준
−30%
−30%
Turns-to-success
1.8회
1.2회
−33%
안전·인지부하 지표
지표
Before
After
변화
Glance Time
기준
−30%
−30%
NASA-TLX
65
50
−15pt
Error Rate
기준
−30%
−30%
신뢰·만족 지표
지표
Before
After
변화
NPS
40
60
+20
System Trust Score
4.5/10
6.8/10
+2.3
Helpfulness Rating
3.2/5
4.5/5
+1.3
08
레슨런 · Lessons
L1
기능이 아니라 OS 레벨에서 문제를 본 경험
"어떤 문장을 읽어줄까"보다 "언제, 누구(차/원격/운전자), 어떤 책임으로 개입해야 하는지"를 정의하는 사고가 필요했다. 이 과정을 통해 서비스를 OS처럼 바라보는 시야를 얻었다.
L2
안전 vs 자율성 트레이드오프를 지표로 설계한 경험
Safe Route Completion Rate를 Primary KPI, Intervention-free Completion Rate를 Secondary KPI로 두어 "개입을 줄이려다 안전을 희생하는 유인"을 막는 KPI 구조를 직접 설계했다. 지표 설계가 곧 서비스의 행동 원칙을 결정한다는 것을 배웠다.
L3
인지부하를 추상 개념이 아닌 측정 가능한 문제로 다룬 경험
"초보 운전자가 불안하다"에서 멈추지 않고, NASA-TLX · Glance Time · Reaction Time · First-pass Success Rate 같은 지표로 인지부하를 가설–실험–결과 구조로 다뤘다. PM은 정성–정량 데이터를 연결하는 역할을 해야 한다는 학습을 했다.
L4
예외 상황을 먼저 정의하고 서비스 신뢰를 설계한 경험
자율·보조 주행 시스템이 처리하지 못하는 상황(날씨·센서 오류·판단 불가)을 정의하고, 원격 관제의 개입 시나리오와 책임 범위를 설계했다. "해피 패스만 잘 만드는 것"보다 실패 시나리오와 백업 플랜까지 설계하는 것이 사용자 신뢰를 좌우한다는 것을 체득했다.
L5
맥락 이해가 기술 정교함보다 우선이라는 인사이트
음성 인식 정확도나 HUD 그래픽 퀄리티보다, "운전자가 언제, 어떤 정보를 먼저 필요로 하는지"(예: 차선 변경 30초 전, 톨게이트 진입 직전)를 제대로 이해하고 설계한 것이 더 큰 효과를 냈다. 좋은 PM은 기술 스펙을 쌓는 사람이 아니라, 사용자의 상황적 맥락과 인지 흐름을 구조화해서 비즈니스 레버로 바꾸는 사람이라는 인사이트를 얻었다.